高质量论文发表,彰显九天创新技术研究实力
发布时间:2025-07-08
访问量: 次
来源:九天创新
祝贺我司纪穑华和汤锦勋两位联培生的论文分别被IEEE ICRA和IEEE ICIT接收。论文的研究问题均来自于九天人对低速无人驾驶场景化应用的思考和探索,并提出我们创新性的解决方案。接下来,用我们的新成果给大家开工增色添彩。A Point-to-distribution Degeneracy Detection Factor for LiDAR SLAM using Local Geometric ModelsIEEE International Conference on Robotics and Automation(IEEE机器人与自动化国际学术会议,简称IEEE ICRA)是机器人领域规模和影响力排名第一的顶级国际学术会议,也是IEEE机器人与自动化学会的旗舰会议,旨在每年为机器人专家和学者发表和交流其研究成果提供国际舞台。IEEE ICRA会议论文行业认可度高,评审和录用严格,因此论文能够发表于ICRA是机器人学者和专家十分高兴的事情。IEEE ICRA 2024(https://2024.ieee-icra.org/)将于5月13日至17日在日本横滨举行,将汇集来自世界各地的机器人研究人员、学生和工业合作伙伴,讨论新的创新和突破,强调机器人和自动化在应对全球挑战中的作用。
激光雷达具有良好的远程数据测量能力和稳定性,是机器人实现同时定位与建图(SLAM)的常用主要传感器之一。为了使机器人得到精确的位置信息,最小化匹配连续帧的几何特征是目前主流方法。但是相关算法主要依赖于激光雷达检测所得到的几何信息,因此,只有在几何特征明显的场景中才能实现较高精度的定位。
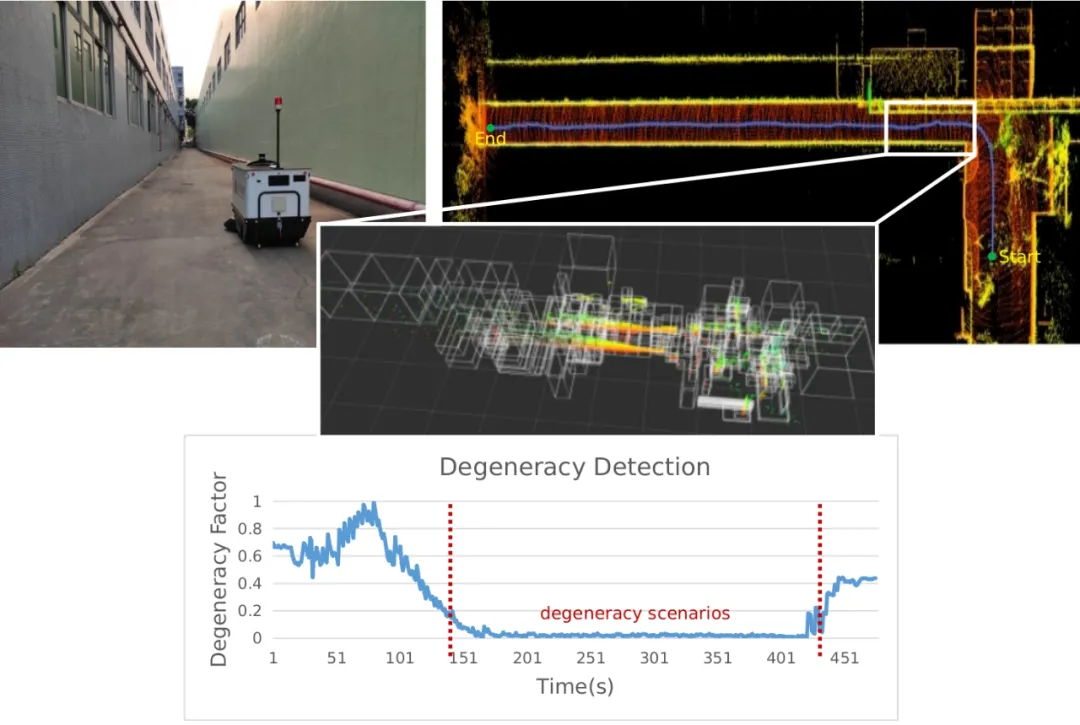
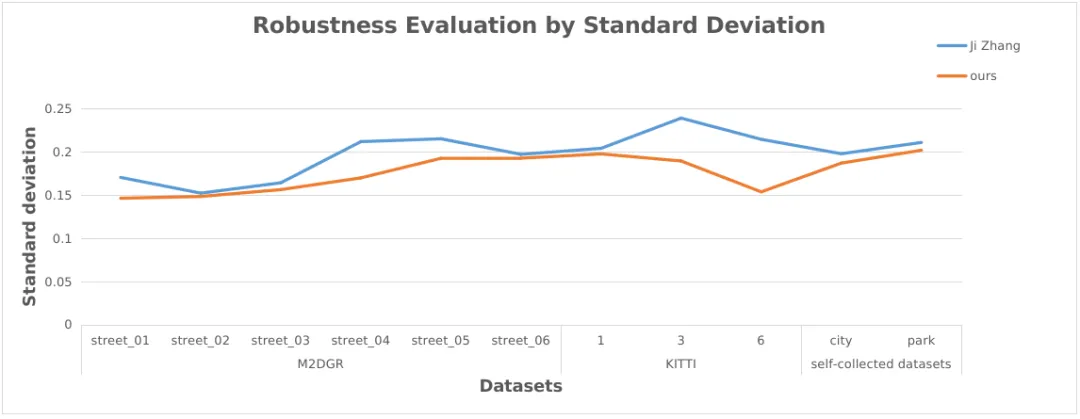
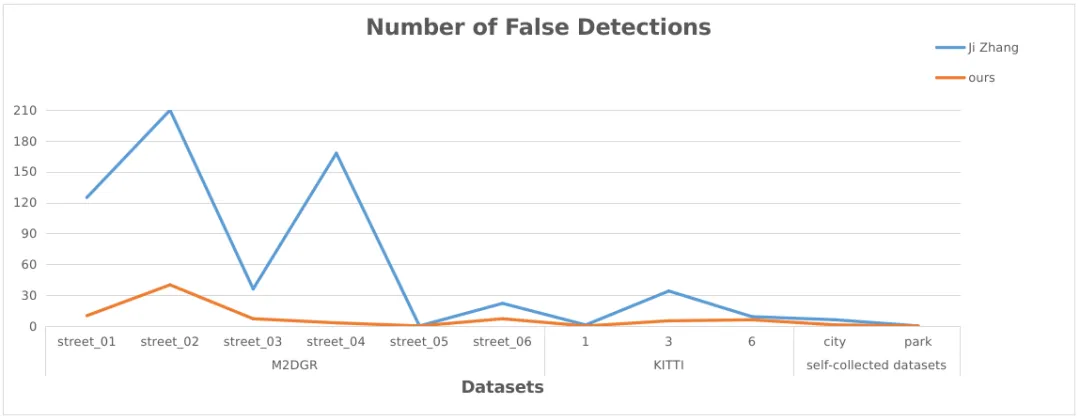
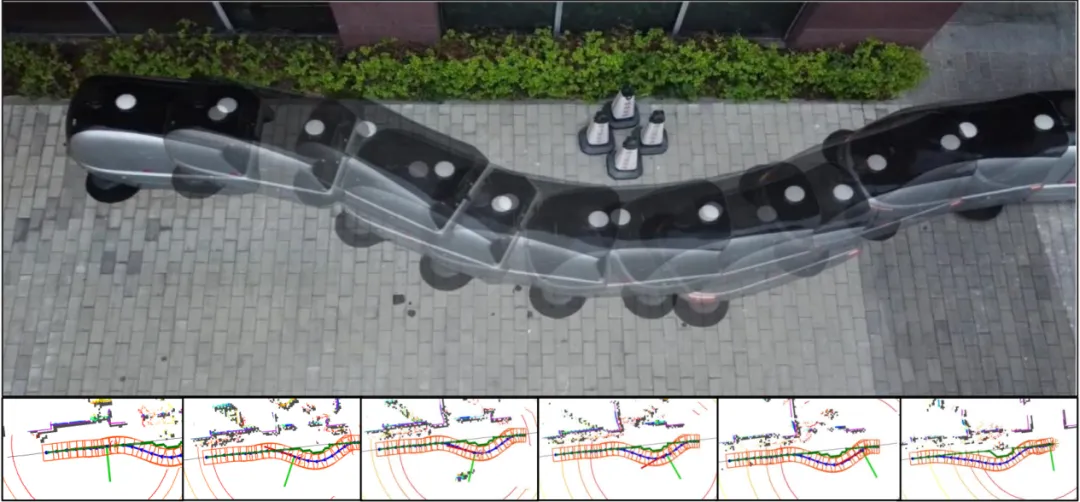
然而,由于激光雷达工作原理和物理特性的限制,某些特殊场景(如长走廊、隧道和空旷场地)的几何信息缺乏某些方向的约束,激光SLAM系统在相应方向上的位置估计准确性将显著降低,从而造成激光SLAM系统无法准确获取机器人的位置信息。这种现象称为激光SLAM退化。若机器人在缺失准确位置信息时继续运动,机器人及环境都将存在较大的安全隐患。为了解决目前激光SLAM退化检测方法仍存在较大的误差的问题,论文提出了一种基于局部几何模型的点到分布退化检测方法,可判断机器人的定位置信度,从而提高机器人运行的鲁棒性。该方法首先基于点云分布密度将激光点云分割成多个局部点云,然后计算当前帧点云在上一帧对应的局部点云空间中的分布概率,最后通过比较帧间分布概率的变化来判断机器人的退化状态,基本原理如下图所示。我们利用标准差评价退化检测的鲁棒性(值越低,表示误检测率越低)。从下图可看出,我们所提出的方法在所有的测试数据集中鲁棒性更好!此外,误检测次数对比实验中,我们的方法误检测次数也更低。
Collision-free Edge-following Path Planner based on Adaptive Sampling Continuous Collision DetectionIEEE International Conference on Industrial Technology (IEEE工业技术国际学术会议,简称IEEE ICIT)是IEEE工业电子学会的旗舰会议之一,致力于传播智能和计算机控制系统、机器人、工厂通信和自动化、柔性制造、数据采集和信号处理、视觉系统和电力电子领域的新思想、研究和进展。第25届IEEE ICIT(https://icit2024.ieee-ies.org/)将于2024年3月25日至27日在英国布里斯托尔举行。
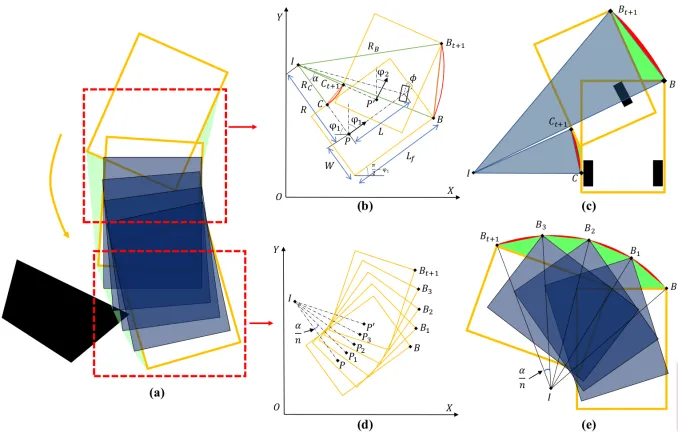
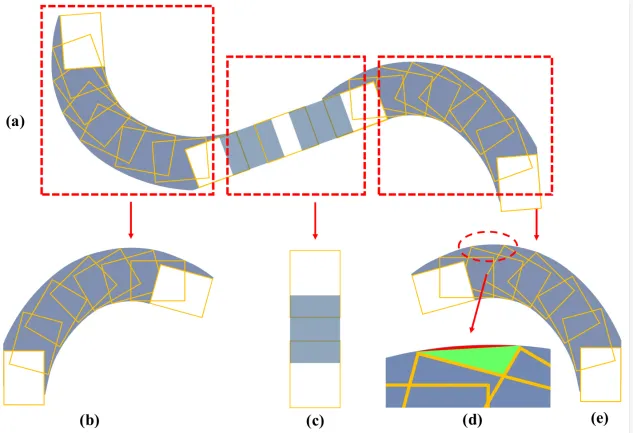
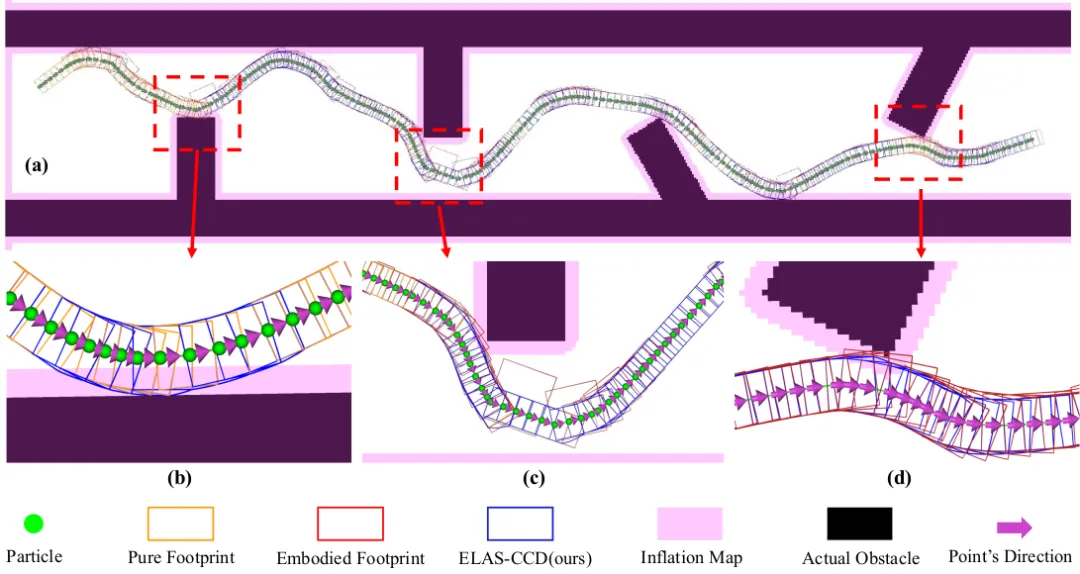
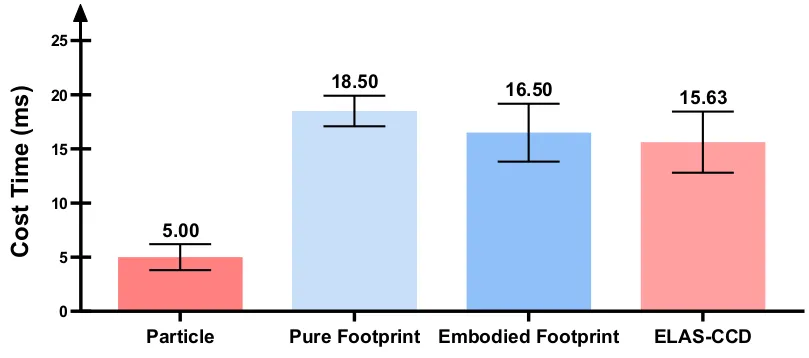
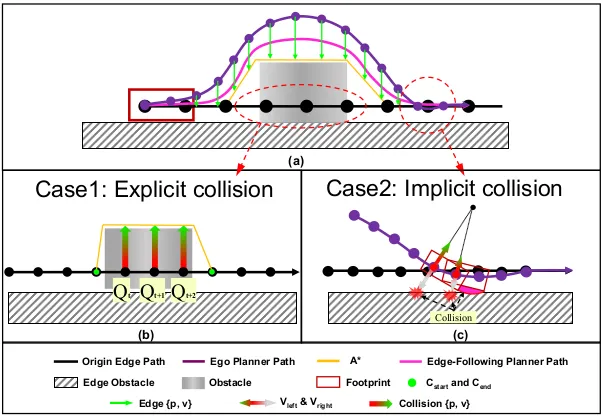
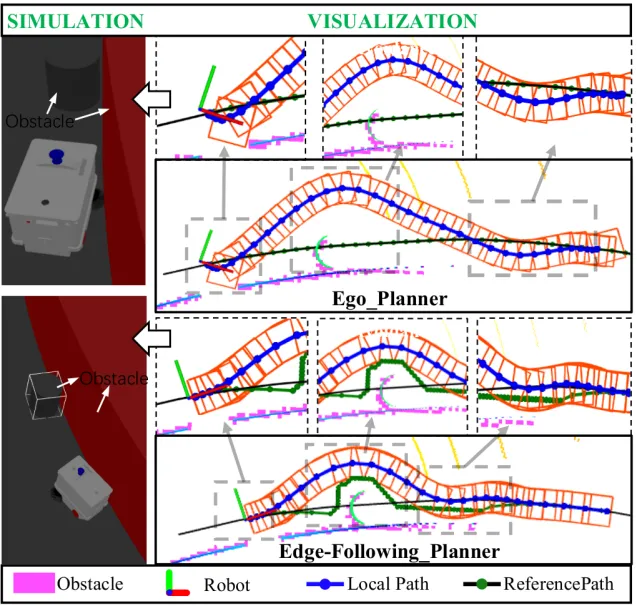
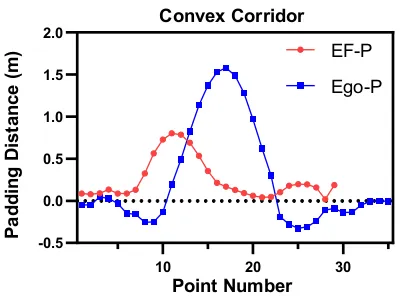
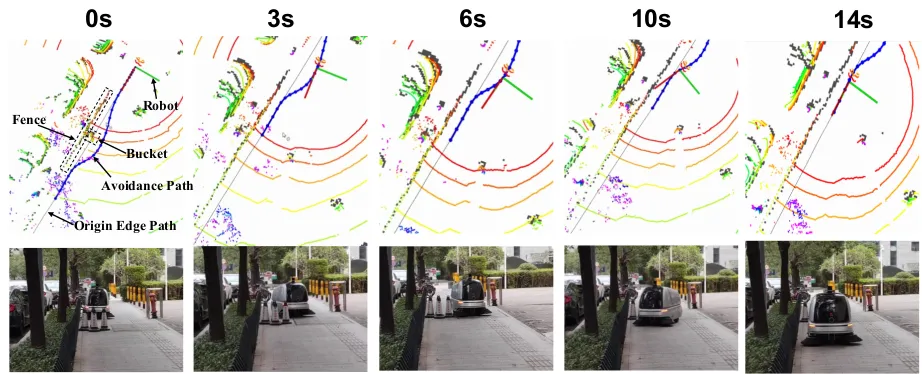
诸如覆盖清扫、物流配送和浇花施药等室外作业任务均要求机器人具备出色的沿边/贴边运动能力。然而,机器人沿边/贴边运动遇到障碍物时,将面临既要尽可能离边/障碍物很近、又必须保证不会碰撞的矛盾,因而对快速准确的碰撞检测和路径规划提出了挑战。实时性和检测精度是碰撞检测算法的两大核心指标。目前的方法难以兼顾两者:要么快速完成碰撞检测但精度低,存在安全风险;要么精度高但时效性低,无法满足工业应用需求。此外,基于B样条曲线的常规无碰路径规划在“切入点”和“切出点”通常不考虑“越边界”问题,而沿边无碰路径规划则必须考虑。为了解决碰撞检测实时性和检测精度的矛盾,论文提出了Error-Limited Adaptive Sampling Continuous Collision Detection (ELAS-CCD),建立了容许误差和采样频率之间的关系,通过插入离散足迹实现指定精度的高效碰撞检测。该方法先把路径离散化,构建两帧之间容许误差与插入足迹频率的模型,然后指定容许误差,通过牛顿迭代法计算插入足迹频率,再进行碰撞检测。与其他三种方法比较,我们提出的ELAS-CCD方法在检测精度以及耗时综合指标获得提升,且检测精度可设置,更适合实际应用。为了提高沿边绕障贴边效果,论文提出了基于B样条曲线的沿边无碰路径规划器EF-Planner,融合了ELAS-CCD并构造了沿边惩罚项以保证贴近障碍物进行沿边绕障。(a)分割跟踪路径上的碰撞段和非碰撞段;(b)提取路段的梯度信息;(c)构造多目标函数进行迭代优化求解。Edge-Planner和Ego-Planner偏移距离统计
相比基准方法Ego-Planner,我们提出的Edge-Planner在沿边清扫绕障时,离障碍物和沿边物体更近,体现更优异的清扫效能和避障效果。
再次祝贺汤锦勋和纪穑华!这份荣誉不仅属于个人和研发部,也属于整个公司为产品和技术而无止境努力的团队。
有赖于无数科研人员接续深耕,行业才得以百舸争流千帆竞。九天创新崇尚科技创新,激励员工敢于啃硬骨头。我们将坚持日拱一卒沉淀技术底气,为行业提供和创造可靠的解决方案。




























 185-7672-2319
185-7672-2319
